
更新日志
- 2026.02.04:二次优化表达
- 2025.12.20:此前的源码修改方案存在误区,本次更新提供一个更底层的 ALAS 源码修正方案,彻底解决 OpenCV matchTemplate
- 2025.12.15-2025.12.17:对博客的整体表达、流程描述及技术细节进行了梳理与优化,使其更易于理解和实践
- 2025.12.14:博客初稿发布,记录树莓派 5 部署 ALAS 的初步探索和基础环境搭建
一、前言
随着考研临近,学业压力变大,高效分配时间成了当务之急。
我主要用联想小新 13 来学习,因为有 Go 语言开发需求,必须开启 WSL 和 Hyper-V。这就带来一个矛盾:在 Hyper-V 模式下,安卓模拟器(如 MuMu)跑碧蓝航线非常卡。
ALAS 运行需要 7x24 小时,这意味着时刻会占用电脑资源。
恰巧手头有一台 SRTP 剩下来的树莓派 5,它的性能不错,功耗极低,完美契合我的挂机需求。
这篇博客主要记录如何在树莓派 5 上部署 ALAS 并运行碧蓝航线,希望能给有类似需求的指挥官做个参考。

二、环境准备
2.1 ARM 安卓环境
树莓派 5 采用的是 arm64 架构,Waydroid 可以在 Linux 系统上基于原生运行安卓系统。
相比在 Windows 运行模拟器,避免 x86 指令集转译。
2.2 系统版本
官方推荐的树莓派 5 版本是 Debian 13。
事实上,我们在一开始也直接使用 Debian 13,后续在配置碰到瓶颈的时候才想着换系统,才有了以下思考。
ALAS 官方文档推荐的是 Debian 11,树莓派 5 已经不再支持,遂放弃。
在 Debian 12 环境下安装 Waydroid 存在依赖缺失问题,稍微尝试后放弃。
2.3 系统配置
内核参数调整
此项调整原因如下:
- 内存页大小:树莓派5官方系统默认使用 16KB 内存页,而安卓系统标准为 4KB。
- 压力阻塞信息:安卓系统依赖内核的 PSI 特性来进行资源管理。
修改方法如下,需要 sudo 权限:
编辑 /boot/firmware/config.txt 文件,在末尾添加一行:
1kernel=kernel8.img编辑 /boot/firmware/cmdline.txt 文件,在现有内容的末尾添加一个空格后,再追加以下内容:
1psi=1
修改完毕后,需要重启树莓派使配置生效。
内存与交换空间优化
为了保证长时间稳定运行,需要优化虚拟内存配置:
- ZRAM 扩容:编辑 /etc/default/zramswap 文件,修改压缩算法为 zstd 并将可用比例设置为 100%,以提升内存交换效率。
- 添加 Swap 文件:创建一个 8GB 大小的物理交换文件(例如 /swapfile)并挂载,作为物理内存不足时的补充。
修复安卓网络检测
Waydroid 中的安卓系统默认会连接 Google 服务器来验证网络连通性。在国内网络环境下,此连接会失败,导致系统判定为“断网”,进而可能使游戏无法正常下载数据或登录。
解决方案是进入 Waydroid 的 shell 环境,将网络检测服务器更换为国内可用的地址。
在启动 Waydroid 容器后,执行以下命令:
| |
这里以小米的服务器为例,也可以替换为华为等其他国内厂商的服务器地址。
中间可能会有遗漏的问题,例如需要锁死分辨率等。
三、安装碧蓝航线
通过官网获取对应的碧蓝航线安装包,然后使用 Waydroid 自带的命令安装碧蓝航线 apk。
| |
安装完毕后打开碧蓝航线,下载资源后登录。
事实上,当登录的时候才会碰到 ping 默认谷歌的问题。
四、部署 ALAS
在游戏可以运行后,开始部署 ALAS。
4.1 基础配置
首先参照 ALAS 官方 Linux 安装文档 完成基础环境的准备工作,例如安装 git、python,随后创建虚拟环境等。
4.2 针对 arm64 修改依赖
官方文档主要针对 x86。
对于 arm64,参考官方文档提供的博客,对项目的依赖进行修改。
修改 requirements.txt 文件: 进入 ALAS 目录,编辑 deploy/headless/requirements.txt,将其修改为以下内容。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25adbutils==0.11.0 scipy pillow opencv-python imageio lz4 tqdm uiautomator2==2.16.7 retrying cnocr==1.2.2 jellyfish pyyaml inflection pywebio==1.5.2 starlette==0.14.2 anyio==1.3.1 uvicorn[standard]==0.17.6 aiofiles wrapt==1.13.1 prettytable==2.2.1 pypresence==4.2.1 ALAS-webapp==0.3.7 rich==11.0.0 zerorpc atomicwrites安装依赖: 在 ALAS 的虚拟环境中,使用修改后的文件安装。
1pip install -r deploy/headless/requirements.txt
4.3 解决库的更新问题
手动补充依赖项。
| |
ALAS 的 Web UI 依赖于 pywebio,需更新该库。
| |
4.4 解决核心库的兼容性问题
部署过程中,opencv-python 和 mxnet 具有兼容性问题,其中后者官方提供的博客中已有解决方案。
替换 opencv-python: 原依赖指定的是 opencv-python,替换为无头版本。
1 2pip uninstall opencv-python pip install opencv-python-headless==4.7.0.72手动安装 mxnet: cnocr 依赖的 mxnet 没有提供官方的 arm64 pip 包。需要手动安装。
安装 .whl 文件。下载社区提供的 mxnet-1.9.1-py3-none-any.whl,使用 pip install mxnet-1.9.1-py3-none-any.whl 安装。
移动 .so。安装后,.so 被安装在了 alas-venv/mxnet/ 目录下。需要手动将文件移动到 Python 环境的包路径中:
1mv ALAS-venv/mxnet/*.so ALAS_venv/lib/python3.8/site-packages/mxnet/
4.5 首次运行与 ADB 授权
完成所有依赖的安装和修复后,便可以尝试启动 ALAS。
| |
在首次运行时,ALAS 会通过 adb 连接到 Waydroid。此时,Waydroid 会弹出一个 USB 调试授权请求。需要进入进入图形化界面点击允许。
成功授权后,ALAS 就获取了控制安卓界面的能力,可以执行点击、截图等操作。
至此,ALAS 部署工作基本完成。
建立 adb 的过程可能需要配置密钥,在此不表。
4.6 so 兼容性问题
在 ALAS 成功连接并可以“点击”游戏界面后,我们很快遇到了一个的障碍:ALAS 无法执行滑动操作。经过排查,问题指向 .so 的版本兼容。
ALAS 的部分底层模块依赖于为 Debian 11,而运行环境是 Debian 13。
软链接
首先尝试创建软链接,试图欺骗程序让它找到一个看似版本匹配的库文件。
| |
这种强行重命名的方式确实解决了滑动问题,但很快引发了新的的错误。在进行图像识别(海图识别)时,程序抛出底层 C++ 断言失败的错误:
| |
这表明库文件的内部实现已不兼容,单纯修改文件名是行不通的。在撤销软链接后,意识到必须从根本上解决环境不一致的问题。
在此之后,尝试直接把需要的系统依赖包从 Debian 11 上下载并安装到 Debian 13 上,但导致了依赖地狱。
系统核心库 libc 出现崩溃,系统变得不稳定。
且需要的旧版库文件众多,手动管理极为繁琐,因此这一方案也被放弃。
探索解决方案
经过仔细分析,我们构想出三条可行的解决路径:
容器中运行 ALAS: 为 ALAS 创建一个纯净的 Debian 11 运行环境,通过 Docker 实现。
在 Debian 13 上重新编译 OpenCV 4.5: 在当前系统重新编译 ALAS 所需的旧版 OpenCV (4.5),使其链接到 Debian 13 的新版系统库。
使用 docker 下载 Debian 11 的旧依赖库后复制粘贴入 Debian 13: 将 ALAS 在 Debian 11 上所需的所有旧版 .so 文件(如 libavcodec58, libtbb2 等)全部提取出来,与 ALAS 程序放在一起。然后通过 LD_LIBRARY_PATH 强制 ALAS 优先加载这些打包好的旧库,而不是系统库。
对于方案 1,直接使用 docker 固然方便,但是会损失一定的性能;对于方案 2,重新编译需要消耗大量的时间和资源。
几经思考之下,我们决定先尝试方案 3,即通过“狸猫换太子”的方式,将 Debian 11 的旧版依赖库打包进 ALAS 的运行环境中,并通过环境变量注入的方式实现兼容。
4.7 基于 LD_PRELOAD 的依赖注入
1. 解决思路
采用一种 沙盒化的依赖管理 策略。即,不触碰系统级的 /usr/lib 目录,而是将从 Debian 11 环境中提取的 .so 集合,放入一个私有目录 ~/ALAS/ALAS_libs 中。
然后,通过设置 LD_LIBRARY_PATH 和 LD_PRELOAD,强制 Python 在运行时,优先加载旧版私有库,从而解决兼容性问题。
2. 依赖库的提取
为了保证所有 .so 文件的纯净与版本一致性,我们选择使用 Docker,在 x86 宿主机上通过 –platform 参数模拟 arm64 架构的 Debian 11 环境。
操作环境:任意安装了 Docker Desktop 的 Windows / Mac / Linux 系统。
创建一个名为 extract_libs.sh 的脚本文件,或直接在终端中逐行执行以下命令(第一行命令执行后会进入容器内部,后续命令在容器内执行):
| |
执行完毕后,在宿主机的当前目录下会生成一个 ALAS_libs 文件夹,其中包含了所有需要的旧版 .so。
请将此文件夹完整上传至树莓派的 ~/ALAS/ 目录下。
3. 构建私有库环境
ALAS_libs 文件夹上传至树莓派后,还需要修复其中库文件的软链接。
Linux 的动态链接器在加载库时,通常寻找的是一个简短的 SONAME(如 libdap.so.27),而我们从容器中复制出来的文件是带有完整版本号的全名(如 libdap.so.27.0.4)。
需要手动建立这种映射关系。
在树莓派终端执行:
| |
4. 启动脚本
为了彻底解决因新旧库符号不兼容而导致的 undefined symbol,单纯设置 LD_LIBRARY_PATH 是不够的。
必须使用 LD_PRELOAD 强制系统在启动程序时,最优先加载指定的旧版核心库。
在 ~/ALAS/AzurLaneAutoScript/ 下创建 run.sh:
| |
最后,授予该脚本执行权限并运行它:
| |
ALAS 将在一个“虚拟 Debian 11 气泡”中启动并运行,它会使用我们提供的旧版依赖库,而完全不会干扰到宿主机 Debian 13 环境的稳定。
然而,当我们通过新脚本启动 ALAS 后,一个熟悉错误再次出现在了终端上:
| |
这正是最初通过软链接方式遇到的那个 C++ 底层断言失败的错误。
至此,我们才恍然大悟:尽管实现方式不同,但无论是之前使用软链接让程序“将就”系统的新库,还是现在通过 LD_PRELOAD 强制程序使用我们打包的旧库,其本质都是一样的——
都造成了程序内部某些组件(例如 Python pip 安装的 opencv-python)与它实际调用的动态链接库 (.so 文件) 之间的版本错配。
我们所做的,只是从系统自动链接到错误版本变成了我们手动提供了错误版本,问题的根源并未被触及。
4.8 海图识别问题
事实上,我们已经成功解决了 ALAS 的点击与滑动功能,只留下海图识别失败。
具体表现为当 ALAS 尝试识别游戏内的地图元素或物体时,会抛出底层错误,导致自动化流程中断。
简单尝试
我们进行了一系列尝试来定位并解决此问题:
- 更换 opencv-python 版本:我们尝试了多个不同版本的 opencv-python 包(4.5.1.48,4.5.5.64,4.7.0.72),试图找到一个能与我们现有环境(无论是系统库还是私有库)兼容的版本,但均以失败告终,总会引发新的依赖冲突或运行时错误。
- 修改 .so 组合:再次回到调整 .so 的思路上,但无论是通过软链接还是 LD_PRELOAD,都无法搭建出一个能让图像识别功能正常工作的环境。
这些失败的尝试共同指向一个结论:简单地从 Debian 11 的 Docker 容器中复制粘贴 .so 到 Debian 13 上运行,这条路是走不通的。
这种方式无法保证所有相关组件(Python 包、底层库、编译器运行时)之间的 ABI 完全兼容,尤其是在涉及复杂计算的图像处理模块上。
尝试容器
既然无法在宿主系统上解决,我们将目光转向了将 ALAS 整体运行在 Docker 容器中的方案,以实现环境的彻底隔离。
然而,这条路也碰到了各种问题:
- 官方 Docker 镜像:ALAS 官方并未提供 arm64 的 Docker 镜像,所以我们先尝试在腾讯云服务器上部署其 x86 官方镜像,发现镜像中的部分配置也已过时,无法直接使用。
- 远程部署:在本地 Windows 主机上部署 ALAS,然后通过阿里云服务器作为 frp 中继,来远程控制树莓派上的 Waydroid。但由于网络延迟过高(单次操作往返约 100 ms),严重影响了 ALAS 的响应速度和稳定性,最终只能放弃。
构建 Docker 环境
在排除了所有捷径后,我们得出了最终结论:必须直面问题,在树莓派本地构建一个完全隔离且兼容的运行环境。
我们的下一步行动计划是:在树莓派上,从零开始构建一个适用于 ALAS 的 arm64 Docker 容器。如果这条路也失败,我们将执行最后的备选方案,即之前构想的方案 2:在 Debian 13 上,从源码完整地重新编译 ALAS 所需的 OpenCV 4.7 版本,以确保其与宿主系统环境的完全兼容。
4.9 另一种方向的思考
此前,我们所有的努力都集中在通过修改系统配置和替换依赖库来解决兼容性问题,但这些方法均未能根治海图识别失败的顽疾。
在准备启动 Docker 方案之前,我们决定暂停下来,尝试一种全新的思考维度:既然无法完美地让环境去迁就程序,那么我们是否可以反其道而行之,直接修改 ALAS 的源代码,让程序主动适应当前的环境?
经过对报错信息和相关代码的深入研究,我们终于定位到了问题的根源。错误发生在模板匹配函数 matchTemplate 中,其直接原因是:
ALAS 在进行海图识别时,将游戏截图转换为了灰度图像,但却用这张灰度图去匹配一个未经处理的、非灰度格式(例彩色)的模板图像。 两种图像格式的不一致,直接触发了 OpenCV 底层的断言失败。
因此,解决方案也变得很清晰:我们只需在 ALAS 的源码中找到进行模板匹配的相关代码,在执行匹配操作之前,增加一步,将加载进来的模板图像同样转换为灰度格式。通过这一简单的修改,确保了参与匹配的两张图像格式完全一致,从而从根本上解决了该报错问题。
4.10 修改源码解决海图识别问题(有漏洞)
具体实施步骤如下:
1. 固定 opencv-python-headless 版本
在此前基于 LD_PRELOAD 依赖注入的版本后进行操作,将 opencv-python-headless 降级到 4.5.5.64。
| |
2. 修改 ALAS 源码
对 ALAS 源码中两处与敌人类型预测相关的文件进行修改,强制在模板匹配前,将模板图像也转换为灰度图。
文件一:AzurLaneAutoScript/module/map_detection/os_grid.py
在此文件中,为 predict_enemy_genre 函数加入了动态格式检查与转换逻辑。
| |
文件二:AzurLaneAutoScript/module/map_detection/grid_predictor.py
同样地,在 grid_predictor.py 的 predict_enemy_genre 函数中,也在模板匹配前加入了相同的灰度转换逻辑。
| |
至此,我们完成了对 ALAS 源码的修改。保存文件后,重新运行 ALAS,这一次,海图识别功能终于恢复了正常,自动化脚本能够顺利执行所有操作。
注意,我们最终的实现方案是先进行依赖注入,然后进行源码替换,而不是完全的源码替换。
4.11 活动图识别问题与解决(2025.12.20 新增)
此前,我们通过在 module/map_detection/os_grid.py 和 module/map_detection/grid_predictor.py 中增加灰度转换逻辑,解决了特定场景下的 OpenCV matchTemplate 报错。
然而在 列克星敦Ⅱ活动 期间,ALAS 尝试进行活动图的文字识别时,同样的 C++ 底层断言错误再次出现。
经过细致排查,我们确认了问题的核心依然是 cv2.matchTemplate 函数对于输入图像类型的一致性要求:
当截图输入 image 是灰度图(2维)时,用于匹配的 template 图像却仍然是彩色图(3维),导致类型不匹配而报错。之前的修改未能覆盖到 ALAS 中所有调用 matchTemplate 的路径。
为了实现一劳永逸的解决方案,决定直接修改 ALAS 中最底层的模板匹配实现。这样所有通过该底层函数进行的匹配操作,都会自动进行图像格式的统一处理,从而彻底避免此类错误。
解决方案:修改 module/base/template.py
1. 还原
将 4.10 中对 os_grid.py 和 grid_predictor.py 的所有源码修改还原回 ALAS 的原始状态。
2. 修改代码
保持此前的所有环境依赖不变,打开 module/base/template.py,找到第 132 行,添加以下代码。
| |
同样的,找到 270 行,添加以下代码。
| |
经过简单测试,本次对底层 template.py 文件的修正成功解决了包括活动图文字识别在内的所有因图像类型不匹配导致的 cv2.matchTemplate 错误。
现在,ALAS 能够在树莓派 5 上更加稳定地执行所有图像识别和自动化任务。
五、访问与控制
树莓派部署完成后,访问成为了日常管理的必要环节。我们对远程方案的选择,遵循了低硬件消耗和低网络带宽消耗的核心原则。
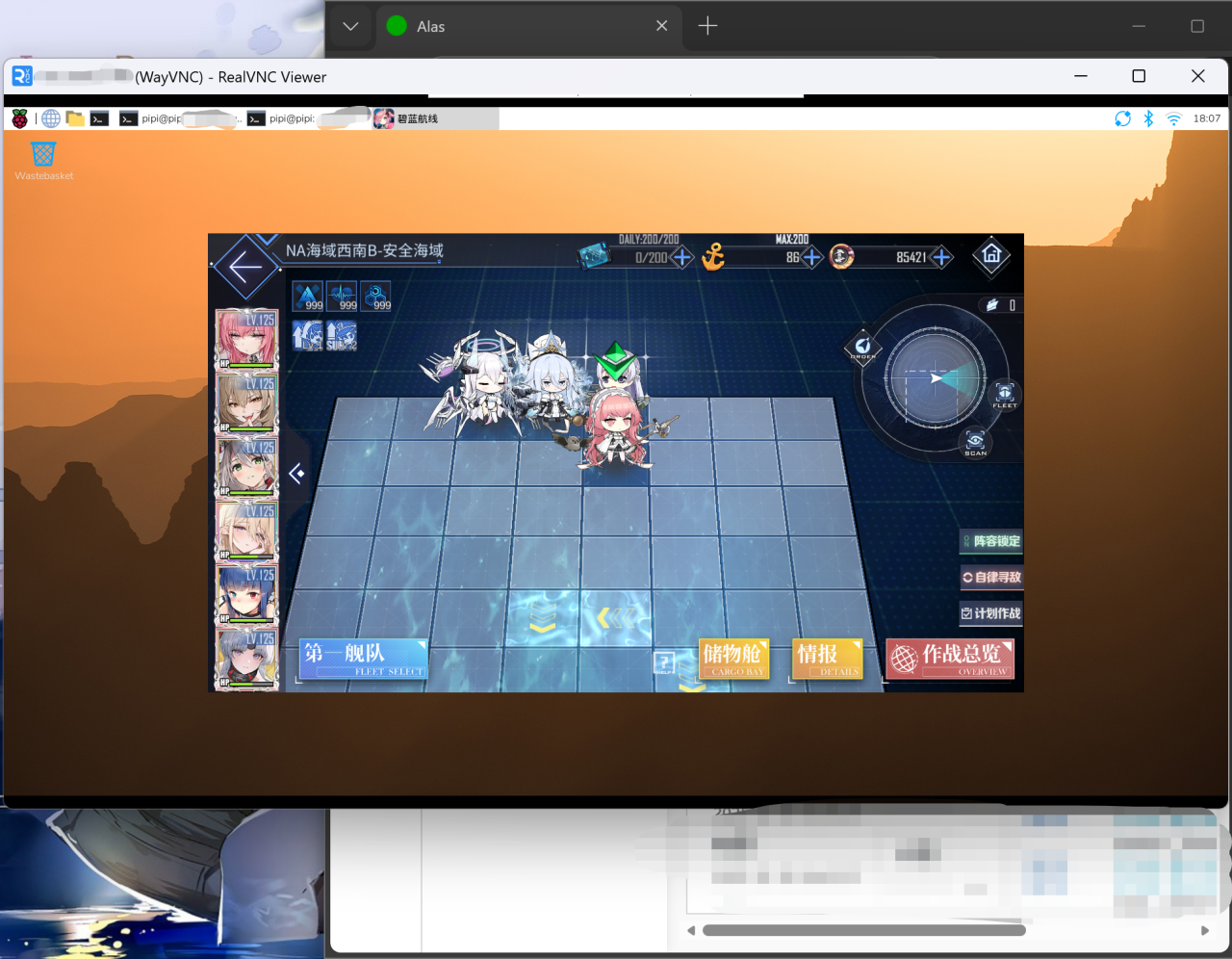
5.1 realvnc
作为树莓派官方操作系统内置的远程桌面解决方案,RealVNC 在局域网环境下的使用最为直接和便捷。在同一局域网下的任何电脑上安装 VNC Viewer 客户端,输入树莓派的 IP 地址,即可轻松连接到其图形桌面。
但是其对于带宽消耗太大,难以支撑远程连接。
5.2 NoMachine
对于非同一个局域网的远程控制,我们最初尝试了基于 X11 显示的 NoMachine。然而运行 Waydroid 需要 Wayland,而 NoMachine 在 Wayland 环境下并不兼容,所以舍弃。
5.3. RustDesk
RustDesk 对 Wayland 具有一定支持,在阿里云上部署了一套 RustDesk 自建服务器,经过调试与排查,最终成功建立了稳定可靠的 RustDesk 远程连接,实现了对树莓派桌面的远程访问与控制。
5.4. 通过加密 frp 访问 ALAS Web 界面
ALAS 的图形用户界面是通过 Web 页面进行访问和管理的。为了避免在资源有限的树莓派上直接运行消耗内存的浏览器,并且能够从外网安全地进行访问,我们采用了 frp 进行穿透。通过这种方式,我们现在可以从任何地方访问 ALAS 的管理界面,而无需在树莓派本地进行任何图形操作。
5.5 最终效果
六、总结与展望
我们成功地在树莓派 5 上部署并运行了碧蓝航线自动化脚本 ALAS。这套系统目前运行稳定,7x24 小时不间断地为我们管理着港区事务,完美实现了将游戏挂机任务与主力学习设备彻底分离的初衷。
由于时间成本的限制,我们当前采用了“基于 LD_PRELOAD 依赖注入(解决滑动问题) + 修正源码(解决海图识别)”的稳定方案。如果未来有更充裕的时间,我们计划探索以下可能性:
- 简化方案验证:尝试在最初使用的软链接方案基础上,直接应用源码修正。如果此方案可行,将能极大地简化新环境的部署流程。
- 探索方案 2:挑战在 Debian 13 从源码完整编译 ALAS 所需的 OpenCV 版本。这虽然是最复杂的方案,但也是最根正苗红的解决方案,能从根本上消除所有兼容性隐患。
希望我们这段充满曲折但最终成功的探索之旅,能为其他有同样需求的指挥官们提供一份有价值的参考。
祝大家武运昌隆,学习进步。
七、致谢
感谢 nnieie 陪同我一起攻克部署难关,使用 3 天,花费 27 小时完成了这次在树莓派上运行 ALAS 的壮举。
感谢 blueinsane0727,她说致谢随便写,那就不写了。
感谢神秘港航提供的活动室。
感谢买一送一的香飘飘。
感谢 20-12 的美团优惠券。
